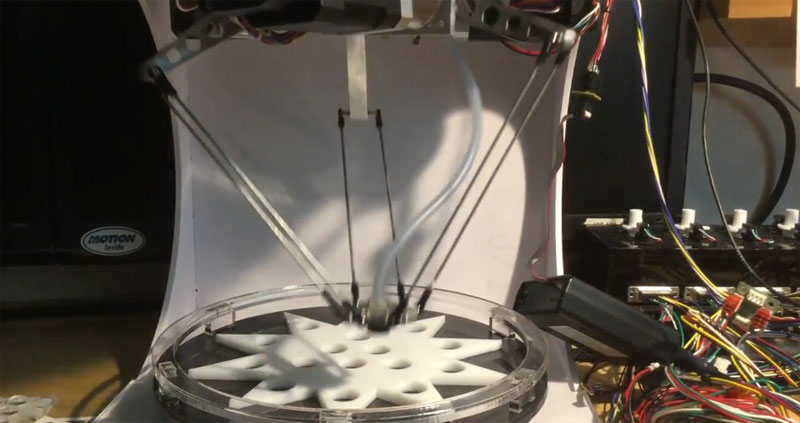
Los robots de tipo Delta son rápidos, muy rápidos ya que debido a su propio funcionamiento, la punta del brazo pesa muy poco y por lo tanto puede desplazarse muy rápidamente. El sistema delta es ampliamente utilizado en aplicaciones industriales y también en algunas impresoras 3D. Hacer un robot de éste tipo mola y mucho, pero su programación no es sencilla ya que los motores, generalmente tres, deben posicionarse con el ángulo acorde a donde queremos apuntar el cabezal. Eso se hace en base a una coordenada espacial (X, Y y Z) y calculando a la inversa la rotación exacta de los motores. A ésto se le llama cinemática inversa (inverse kinematics en inglés). A continuación os dejo un vídeo del funcionamiento de un robot delta casero para ir poniéndose calientes, pero lo más importante y quizás más interesante, es el enlace que os dejo a una función escrita en C para el cálculo de la cinemática inversa y cómo funciona.
Enlace: Cálculo de cinemática Inversa
 Ghost Minitaur: El robot de cuatro patas capaz de saltar casi cualquier cosa
Ghost Minitaur: El robot de cuatro patas capaz de saltar casi cualquier cosa
 Andreas presenta la nueva pinza para su brazo robot Mantis
Andreas presenta la nueva pinza para su brazo robot Mantis
 James Bruton explica cómo hacer un actuador lineal barato con Arduino
James Bruton explica cómo hacer un actuador lineal barato con Arduino
 SpotMini: El nuevo robot silencioso de Boston Dynamics
SpotMini: El nuevo robot silencioso de Boston Dynamics
 Guía: Cómo hacer un robot con Raspberry Pi
Guía: Cómo hacer un robot con Raspberry Pi
 Sphero: Bola robot con mando a distancia
Sphero: Bola robot con mando a distancia