Publicado por Oscar Gonzalez
en RobĂłtica
el 19/08/2021
Publicado por Oscar Gonzalez
en RobĂłtica
el 19/08/2021
Casi terminando con su carrera en ingeniería mecánica, el estudiante del Instituto de Tecnología Rose-Hulman, Josh Eckels, se puso a construir un robot controlado por IA que juega al ajedrez contra un oponente humano. El sistema es esencialmente un cubo gigante formado a partir de perfiles de extrusión de aluminio con un gran tablero de ajedrez en su base. Muchas de las piezas utilizadas ya las conocemos bien ya que la gran mayoría se utiliza en casi todas las impresoras 3D.
Para crear el robot, ha utilizado cuatro motores paso a paso en total para mover la pinza que agarra las piezas, incluido uno para el eje X, otro para el eje Y, un motor que hace girar una varilla roscada para levantar la pinza y un motor final que gira para abrirla o cerrarla. Todos estos motores se conectan a una placa Arduino UNO con una CNC Shield conectada. Todo el conjunto se conecta por USB a una Raspberry Pi que ejecuta el motor de ajedrez Stockfish.
Stockfish es un gran motor de ajedrez que realiza un seguimiento del estado actual del juego y realiza movimientos de acuerdo con el nivel de habilidad seleccionado. En los rangos superiores, se vuelve casi imposible de vencer por un humano.
El jugador selecciona en una pantalla dónde quiere colocar su pieza, lo que hace que el robot la recoja y la coloque en otro lugar. Posteriormente, el motor hace su movimiento.
Leer más
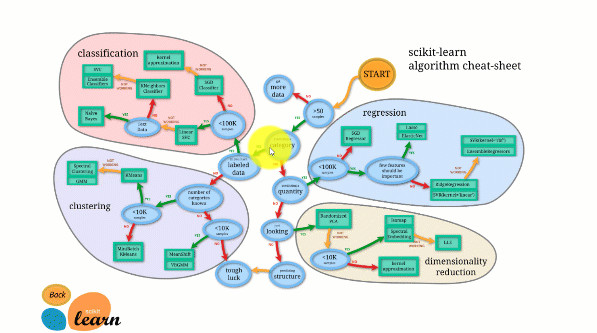
Scikit-learn es una biblioteca de Python de código abierto para el aprendizaje automático o Machine Learning. La librería soporta algoritmos de como KNN, XGBoost, bosque aleatorio, SVM entre otros.
Está construido sobre Numpy y ayuda en el preprocesamiento, clasificación, la regresión y la agrupación y la selección de modelos entre otros
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 31/03/2021
Hemos visto diferentes robots capaces de pintar o dibujar en paredes y normalmente todos lo hacen a partir de una imagen vectorial o imagen de bits. El formato vectorial permite trazar rutas precisas y es más fácil de interpretar. Pero éste robot que se llama AI NORN es diferente. Se trata de un pequeño robot que tiene una pinza para pinceles y puede seleccionar entre varios colores y también limpiarlos con agua. Hasta ahora bien, pero lo interesante es que el robot espera como entrada una imagen de bits, vamos una imagen con pixels de toda la vida y mediante inteligencia artificial es capaz de crear las pinceladas necesaria para recrear la imagen sobre el lienzo. Estamos hablando que con Machine Learning, es capaz de saber la longitud, ángulo y dureza de cada pincelada necesaria para completar la imagen. En el vídeo a continuación lo verás mejor.
Leer más
Publicado por Oscar Gonzalez
en TecnologĂa
el 13/11/2020
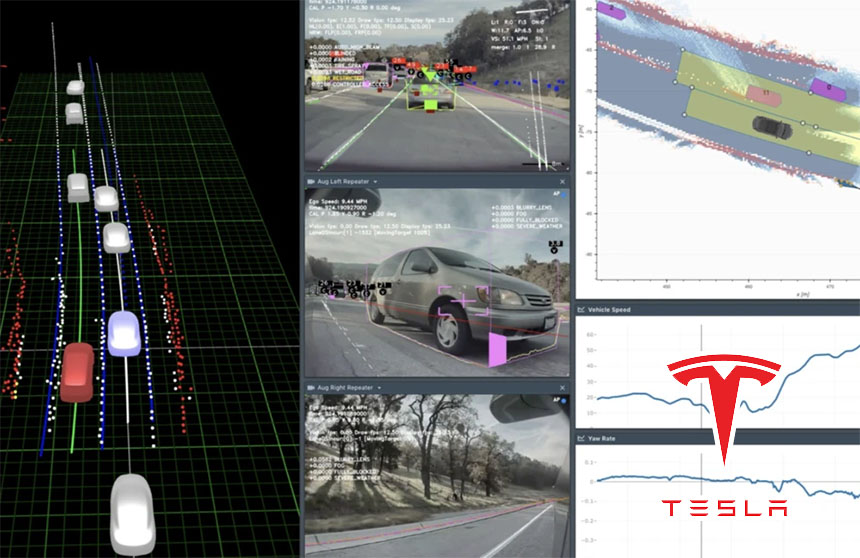
El proyecto DOJO de Tesla, encabezado por el ya mítico Elon Musk, es bastante secreto y lo sigue siendo por el momento, pero cada vez se van conociendo más detalles acerca de qué es el proyecto DOJO. Consiste principalmente en unos nuevos procesadores marca de la casa, capaces de entrenar conjuntos de redes neuronales con una realmente ingente y vasta cantidad de datos del rango de los exaFLOPS. O lo que es lo mismo, diez elevado a dieciocho. Con esto, será capaz de crear la mayor y más potente red neuronal hasta ahora jamás vista, y que se aplicará al entrenamiento constante de su sistema autopilot. En el vídeo que os dejo a continuación, se explica de qué va éste sistema tan prometedor.
Leer más
Se llama Furlexa y ya solo el nombre me parece genial. Se trata de mítico robot Furby que seguro recordarás, tenía una mecánica interna bastante interesante y podía comunicarse y aprender de su entorno gracias a una pequeña inteligencia artificial muy básica. La verdad es que tuvo bastante éxito en su momento y era muy simpático. En el vídeo que te dejo a continuación, se aprovecha el Furby para darle una nueva vida y transformarlo en un Amazon Echo usando una placa Raspberry Pi. De esta forma, se pueden decir varios comandos como lo harías con el Echo, pero con una apariencia mucho más molona.
Leer más