Publicado por Oscar Gonzalez
en RobĂłtica
el 18/11/2010
Publicado por Oscar Gonzalez
en RobĂłtica
el 18/11/2010
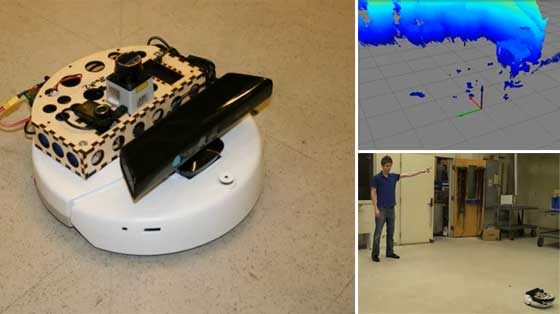
El sensor Kinect de Microsoft está que no para y tal y como anunciábamos hace pocos días, no paran de llover aplicaciones nuevas utilizando el driver Open Source para Kinect recientemente creado por un Español. Ahora le toca el turno a éste robot Roomba (también llamado iRobot) que mapea su entorno en 3D mediante Kinect y utiliza SLAM para posicionarse.
Impresionante video a continuación...
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 12/11/2010
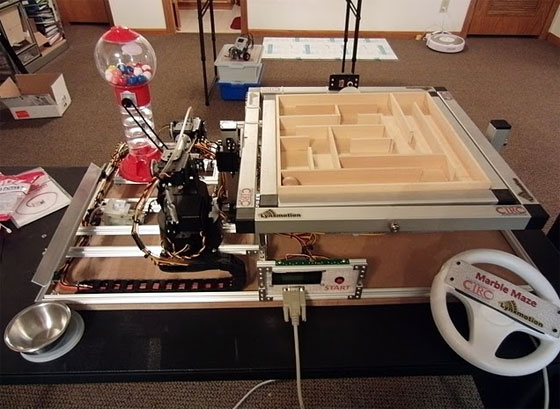
Es muy probable que existan varias formas de cojer un simple chicle pero quizás la mejor o más interesante sea usando el principio de Rube Goldberg. Aqui teneis un interesante dispensador de chicles casero que utiliza un laberinto dinámico controlado con el volante de la Wii y cargando las bolas con un pequeño brazo robot. Si consigues llevar la pelolita hasta el final del laberinto, tendrás tu chicle! Todo el conjunto está controlado mediante un BasicStamp de Parallax.
No os perdais los videos y enlace a continuación...
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 09/11/2010
Son muchos los proyectos de brazo robot caseros pero éste sin duda me ha llamado mucho la atención, será por que actualmente estoy trabajando en el diseño de un de estos... Lo primero que llama la atención es su chasis de aluminio torneado a medida. Tiene 5 ejes de movimiento y utiliza unos potentes motores paso a paso Gecko 250 que le proporciona unos 14 kilos por centímetro de torque en cada eje. Está controlado con un PIC32 aunque no se especifica qué controlador utiliza.
Lamentablemente, no hay información adicional pero seguro que su autor ha trabajado muy duro y el resultado es realmente impresionante!
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 05/11/2010
He hablado en otra ocasión del impresionante robot QBO, un pequeño robot que pretente ser el nuevo R2D2 y que aparte de utilizar Linux com plataforma base para su funcionamiento, es totalmente Open Source. La gente de The Corpora, los creadores del QBO, está haciendo grandes avances tal y como se muestra en un video publicado en su canal de YouTube, donde podemos ver el pequeño QBO utilizando SLAM (localización y mapeo simultáneo) en tiempo real para encontrar un camino correcto. Durante ese proceso, el robot reduce su velocidad hasta 4 veces. Una vez mapeado el lugar, aumenta su velocidad para recorrer el camino que ha aprendido de la forma más rápida y eficiente.
Me parece impresionante el trabajo y seguro que veremos muchas más cosas muy pronto sobre éste estupendo robot. No os perdais el video!
Leer más
Publicado por Oscar Gonzalez
en Tutoriales
el 16/10/2010
Mucha gente me pregunta sobre cómo hacer un pequeño robot. La verdad es que es una pregunta un póco dificil de responder ya que hay muchas maneras de hacerlo y por supuesto muchos tipos de robots diferentes. En la gran mayoría de los casos, se suelen montar robots tipo coche con servomotores o motores de corriente contínua. Esto es lo que os voy a mostrar hoy, un robot con tracción a las cuatro ruedas con motores de corriente contínua. La idea aqui no es hacer un gran robot inteligente que sea capaz de traernos el desayuno a cama (aunque sería la leche!), sino la base para crear un pequeño robot con tracción a las cuatro ruedas basado en Arduino que os pueda servir de base para un robot más completo e inteligente, incluyendo distintos tipo de sensores como los de distancia, GPS o incluso telemetría.
Es un tutorial muy básico que todo el mundo puede realizar de forma sencilla y en muy poco tiempo. Luego de tener la base, podemos ir añadiendo más complejidad. Por supuesto no dudeis en dejar vuestro comentario, dudas y sugerencias!
Leer más